Robotic Palletizing
HERSEN’s palletizing robots can automatically, programmatically load, unload, manipulate and flip porcelain, marble, granite, quartz, tile boxes, cement blocks or bricks. Design and manufacture according to the specifications of each client, can be integrated into one or more production lines. It is controlled by four Cartesian axes (X, Z, Y, C) and simple and intuitive user software.
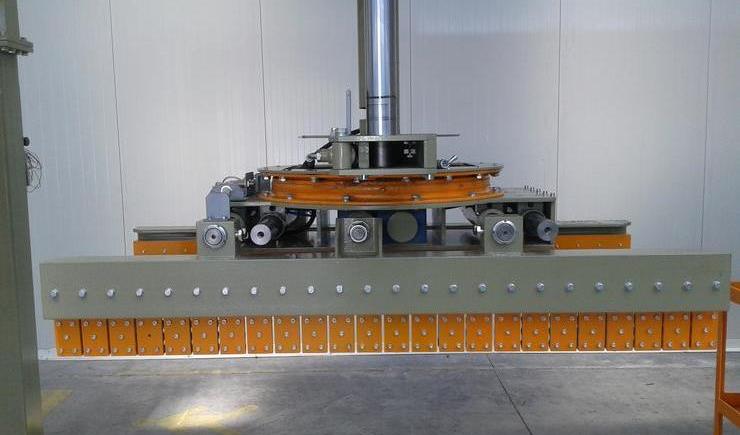
They can be equipped with suction cups or mechanical grippers depending on the application and the product to be handled.
Loading and unloading of porcelain tiles, marble, granite, quartz.
The palletizing robot equipped with a suction cup is designed to handle porcelain, marble, granite, quartz and solid surfaces. For example, they can automatically load large-format porcelain tables into horizontal drawers. Unload drawers horizontally and load tables vertically by positioning them on trestles.
Another example is the integration of the palletizing robot in cutting lines, polishing lines or resin lines for loading and unloading the tables.
Palletizing robot equipped with a suction pad for marble tables
Palletizing robot integration to load marble boards on cutting line

Automatic table loading from the trestle (vertical) to the line input (horizontal)

Loading and unloading of slab and band with suction cup

The palletizing robot equipped with suction cups to manipulate bands or slabs of marble, granite, quartz or porcelain. For example, they can be integrated into processes of polishing, resining, packaging on pallets, in boxes, strapping of parts and other applications.
Palletizing robot with suction cup for integrated in marble strip cutting line

Palletizing robot with suction cup to handle, load and unload porcelain

Robot palletizer manipulating marble strips using a suction cup

Automatic and programmable download of marble trestle bands

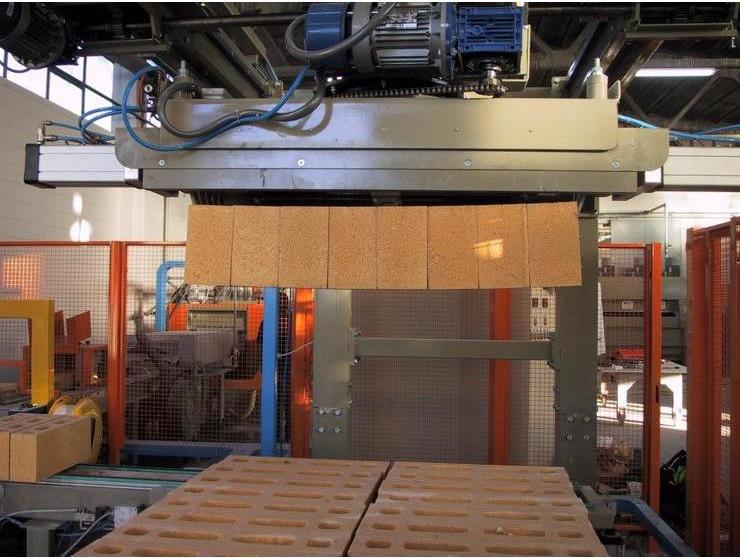
Palletizing robots with gripper
HERSEN’s palletizing robots equipped with gripper to grip material and automatically and programmatically manipulate boxes of tiles, cement blocks or bricks. Design and manufacture according to the specifications of each client, can be integrated into one or more production lines. It is controlled by four Cartesian axes (X, Z, Y, C) and simple and intuitive user software.